Commencez par créer une nouvelle esquisse 3D.

Voici maintenant des équations d'exemple que vous pouvez utiliser dans la fonction "Courbe par équation" afin de créer une courbe hélicoïdale:
En coordonnées cartésiennes:
x(t) = rayon * sin(360 * nb_tours * t)
y(t) = rayon * cos(360 * nb_tours * t)
z(t) = hauteur * t
= nb_tours * pas * t
En coordonnées cylindriques:
r(t) = rayon
theta(t) = 360 * nb_tours * t
z(t) = (idem qu'en coordonnées cartésiennes)
------------------------------------------------
Voici maintenant quelques exemples réalistes obtenus à partir de la fonction Courbe par équation et en utilisant l'une de ces fonctions.
pour les 4 exemples les valeurs suivantes ont été utilisées:
rayon = 3 ou 3 * t
nb_tours = 5
hauteur = 10
pas = 2 ou 2 * t
t variant entre 0 et 1
1. rayon constant et pas constant:
x(t) = 3*sin(360 * 5 * t) r(t) = 3
y(t) = 3*cos(360 * 5 * t) theta(t) = 360*5*t
z(t) = 5*2*t z(t) = 5*2*t

2. rayon constant et pas variable:
x(t) = 3*sin(360*5*t) r(t) = 3
y(t) = 3*cos(360*5*t) theta(t) = 360*5*t
z(t) = 5*2*t*t z(t) = 5*2*t*t

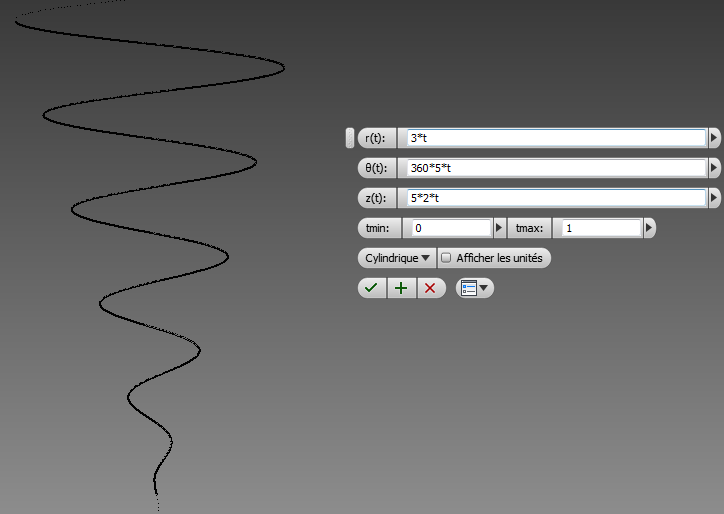
3. rayon variable et pas constant:
x(t) = 3*t*sin(360*5*t) r(t) = 3*t
y(t) = 3*t*cos(360*5*t) theta(t) = 360*5*t
z(t) = 5*2*t z(t) = 5*2*t
4. rayon variable et pas variable:
x(t) = 3*t*sin(360*5*t) r(t) = 3*t
y(t) = 3*t*cos(360*5*t) theta(t) = 360*5*t
z(t) = 5*2*t*t z(t) = 5*2*t*t

Aucun commentaire:
Enregistrer un commentaire
Remarque : Seul un membre de ce blog est autorisé à enregistrer un commentaire.